突破转速制约、创造新价值-高速步进电机
-
自动化
-
医疗.福利
-
居住环境

为生产线生产效率的进一步提高作出贡献的步进电机
"提高制造业生产效率的关键是什么?"
这个问题有多种答案,"缩短生产节拍"应该是其中之一吧。生产节拍是指生产一件产品所需的时间。如果能够缩短生产节拍,在相同的时间内,就可以生产出更多产品,这也关系到工作效率的提高。
艾斯湃纳启动了一个项目通过提升电机性能,以帮助客户解决"希望缩短生产节拍,提高生产效率"的课题。
安装在半导体制造设备等中的电机,主流产品是利用编码器形成闭环控制位置的伺服电机。另一种是不使用编码器、通过开环控制位置的步进电机。与伺服电机相比,它的优点是体积小、高效节能、低振动,但缺点是停转精度低,不适合用于高速旋转。
因此,如果能够开发出一款既发挥步进电机的优点,又能实现伺服电机一样停转精度、高速旋转的电机,也许将有助于更有效地提升制造工艺自身的加工速度、提高客户的工作效率。
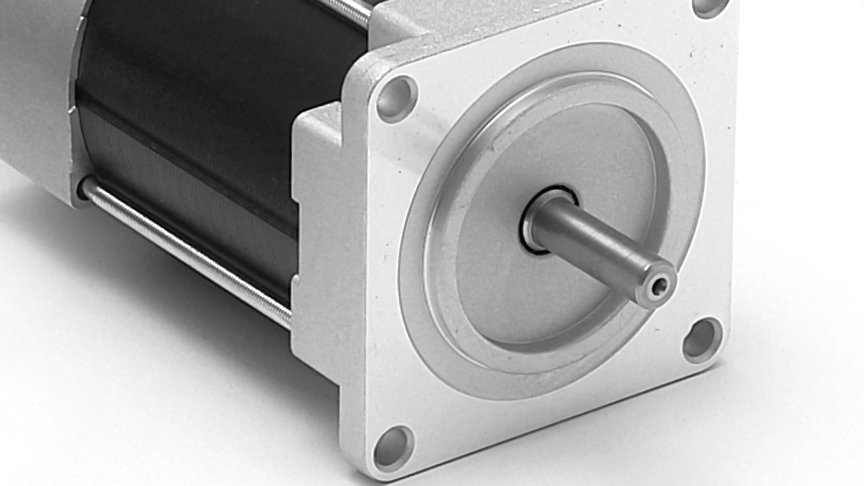
在此背景下,艾斯湃纳凭借编码器形成的闭环驱动和独有的控制软件,开发出了既发挥了步进电机的优点,同时停转精度高、可以高速旋转的步进电机。
"弱化磁场"结合独有的电流矢量控制实现高速旋转
提高步进电机的停转精度这一点,已经通过像伺服电机一样利用编码器形成闭环进行控制而实现了。但是,步进电机的高速旋转的实现,则需要开发新的电流控制方法。
与伺服电机相比,步进电机很难实现高速旋转,原因在于它的运动机制。
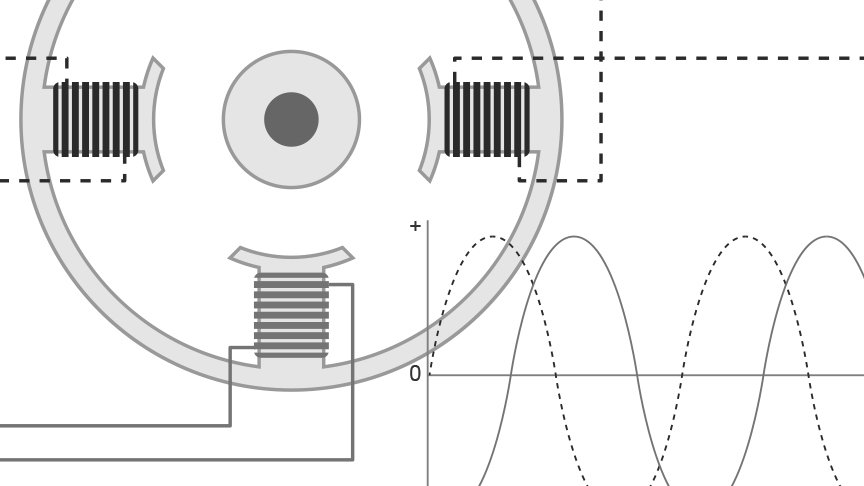
电机是通过电流产生磁场,利用磁力带动轴的旋转,其结构和发电机是一样的。只不过发电机是反过来,通过轴的旋转产生电。因此,电机带动轴的旋转,也会产生新的电力(反电动势)。电机一旦高速旋转,反电动势就会加大,导致电机的驱动电压和发电生成的电压(反向电压)相互牵制,从某个时间点开始,转数无法继续增加。
步进电机是控制电流,将轴的转动转换为精细的步进运动,所以与伺服电机相比,内部有很多磁极。这很容易造成强大的反电动势,很难高速旋转。
为此,艾斯湃纳决定采用一种名为"弱化磁场"的方法。具体步骤是,首先进行电流矢量控制,将电流分解为转矩电流(q轴)和励磁电流(d轴)两类,各自独立控制。然后,在反向电压伴随电机旋转加快而上升,与驱动电压相互牵制之前,单独减弱励磁电流,从而降低反电动势。
但是,如果不能准确控制"弱化磁场",反而会降低电机的工作效率。不仅如此,它还会造成电机速度持续加快,陷入失控状态。为了避免上述情况,我们在计算"弱化磁场"的基础上,追加了控制转矩电流,研究制定出了独有的电流矢量控制的计算方法。
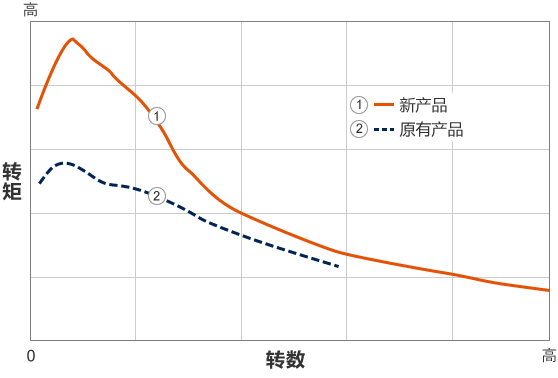 对比原有产品,新产品在高速区域也可以旋转
对比原有产品,新产品在高速区域也可以旋转
通过上述方法,艾斯湃纳实现了独有的步进电机。该产品利用编码器形成闭环,停转精度高,而且在反向电压大幅超过电机驱动电压的范围内,也可以高速旋转。
提高产品成熟度、全面覆盖客户需求
根据客户用途和需求,电机外加的负载情况和旋转速度的范围各不相同。因此,在商品化的过程中,需要构建全面覆盖这些用途和需求的算法、开发相关软件。
艾斯湃纳模拟客户使用步进电机的设备,制作出多款负载测试夹具,通过实施改变各种惯性力矩及摩擦负载等、数量庞大的运动试验,从而完善了核心技术,提高了产品的成熟度。
同时还召集实际使用电机的客户和艾斯湃纳的技术人员进行实验及验证,其结果得到了高度评价。
工程师们将各自的知识、经验和技术集思广益,投入核心技术开发、产品性能开发、性能评估等各要素的开发中,由此推进产品开发。
 CSB-BZ 伺服驱动器
CSB-BZ 伺服驱动器
追求耗电低、速度快、精度高的位置控制,服务更多客户
采用本次开发的步进电机,可以在高速旋转的同时,准确控制位置,非常有助于削减制造工艺的浪费、缩短生产节拍。
步进电机原本就可以通过低电量,产生与伺服电机同等的转矩。而且,步进电机由于磁极精细,所以定位点多。因此,发挥其体积小(节省空间)、高效(节电)、低振动的特点,不仅可以用于制造设备,还可以用于此前未使用步进电机的产品。例如:将其用于照相机驱动,可以降低图像抖动;用于轻小型搬运,可以减少振动对搬运物的影响。
艾斯湃纳未来还计划在步进电机上安装驱动器、控制器的配线及电路等,努力开发出一体化等产品。