以独特创意为客户创造价值 - 艾斯湃纳的专利技术
-
自动化
-
机器人
专利源于了解客户行业并实现客户需求
革新性的发明,来自迄今从未有人想到的创意、以及此前没有发现的新方法等。是否能够发现别出心裁的想法,并拥有将其付诸实现的技术?如果做不到开拓思路、探求技术,就不可能创造出全新的产品。艾斯湃纳一直立足于深入了解市场及顾客需求,并在此基础上不断进行技术研发。由此产生的多项创意与技术,最终结出了专利的硕果。
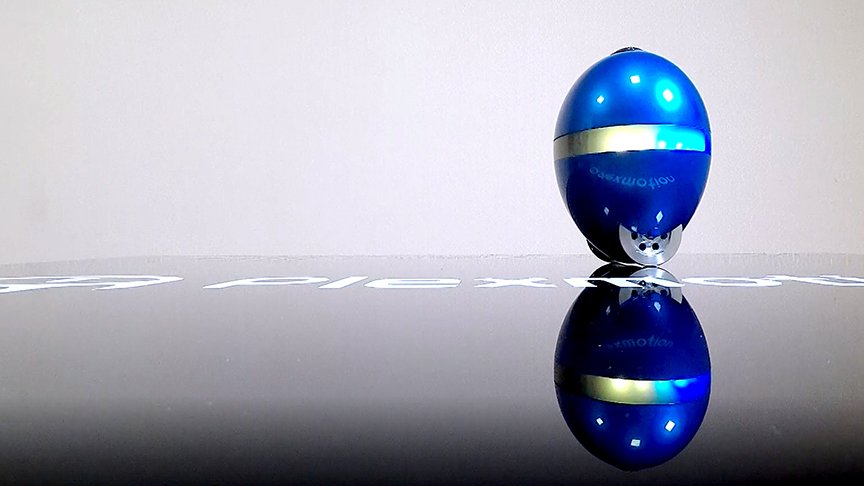
在艾斯湃纳开发专利技术并完成的产品中,有一款电动机械手。这款电动机械手具有可轻松实现多功能化的中空结构;精心设计了凸轮型手部结构与电机的连接部位;并且实现了整体的小型化。其中每一项技术,都蕴含着技术者们的热情、以及提出新想法并反复尝试的开发历程。
中空结构源于精简无用部分、反复优化
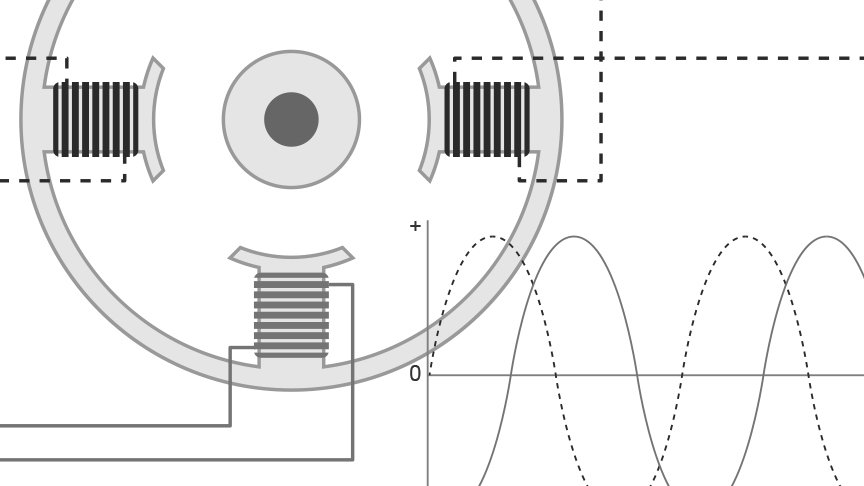
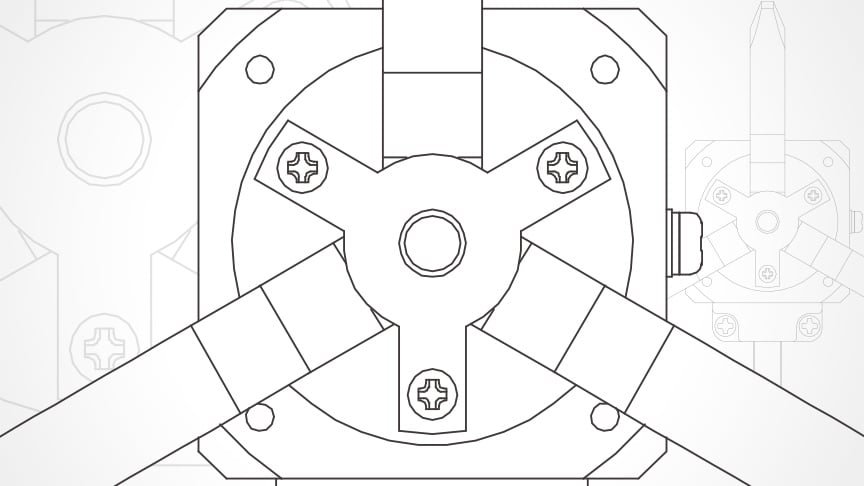
"挑战抓持所有物体"。以这句话为目标开始研发的电动机械手中,有一项专利技术和另一项与其他公司合作、正在共同申请的专利技术,这两项技术都值得大书特书。首先是艾斯湃纳独立取得的专利技术—中空结构。中空结构是指从电动机械手的后部一直贯穿到前部的开孔,它位于操控手爪运动的凸轮机构和带动凸轮运动的电机转轴上。通过开孔的内部可以安装照相机等。这成为了前所未有的结构(日本第6342567号专利)。
这种中空结构,实现了电动机械手的多功能化。例如在孔内安装照相机,就可以在拿起目标物体前的瞬间,从电动机械手角度拍摄照片;安装喷气配件,则可以通过喷吹气体,清理抓持物体上的污垢;或者配合吸附垫使用,在抓持物体时充分发挥电动机械手的优势,确保手爪可以牢牢抓住物体。
 中央的孔洞配置了附加装置,可以通过空气将污物吹走
中央的孔洞配置了附加装置,可以通过空气将污物吹走
实际上,为了实现中空结构,我们必须对电动机械手进行了全方位的改进。包括精简无用部分、改进电机内部结构及控制电路等。
由于中空结构此前没有先例,所以开发阶段投入了大量的人力进行机械设计,以满足产品技术要求。经过多次更改设计、反复优化内部构造及控制技术,最终令电动机械手同时实现了小型化和中空结构。该结构的诞生,为电动机械手的多功能化提供了可能。
与其他公司合作实现了小型化的立体凸轮机构与电机的连接技术
另一项技术,是通过与其他公司合作,开发出了立体凸轮机构与电机连接的小型化构造。该构造目前已进入共同申请专利阶段。(2019年9月现在)
立体凸轮机构是指驱动电动机械手、机械手臂等的关节部位的机械构造。为了在不妨碍电动机械手爪动作的情况下,将立体凸轮与电机的转轴连接起来,需要使用连接器。因此,必须为立体凸轮部分留出充足的空间。当时我们认为,要想实现机械手臂的小型化,就需要解决这一问题。
针对如何确保这部分的空间,我们通过在凸轮之间的缝隙处设置用于连接的螺纹孔,同时在电机转轴上也设置相应的螺纹孔,解决了问题(日本专利申请公开2019-72795)。从而成功将更换零配件减少到最小限度,降低了产品自身的成本及维修成本,推动电动机械手实现了小型化及最大限度的抓握力。
这项成功的背后,还有与拥有高精度立体凸轮机构专利企业的合作。为了让电动机械手抓持更多物体,开发团队历尽艰辛寻找答案,最终采取"协作"的方式,在其他公司凸轮机构的基础上,进行了全新的开发。而将艾斯湃纳的电机和控制技术,结合其他公司的立体凸轮机构专利,从而实现小型化的思路,是渴望开发出"更高水平产品"的热情的产物。可以说,这款拥有高性能电机与控制技术的产品,只有电机厂商才能做到的。正因为有了这个基础,才能将技术提升到了共同申请专利的特有高度。
 通过与其他公司的合作,我们实现了机械手的小型化
通过与其他公司的合作,我们实现了机械手的小型化
我们的专利技术将会创造怎样的未来
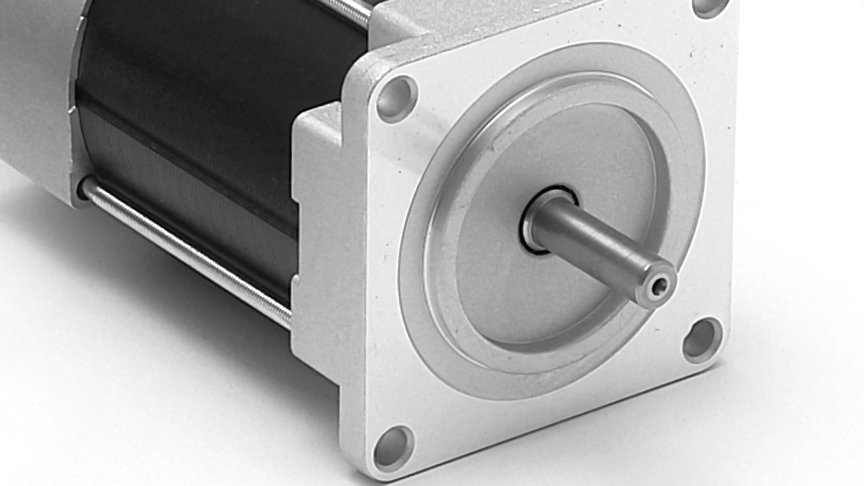
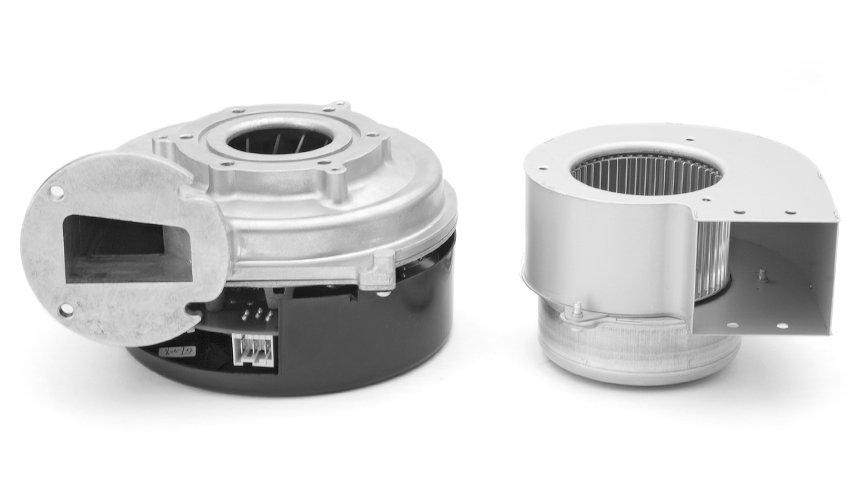
除了电动机械手,艾斯湃纳的电机、减速机、控制电路、送风机、外壳等产品均为客户创造了价值、并汇集了诸多全新尖端技术。
可以说,这些技术具有特殊价值。它们来自于开发人员为了满足市场和顾客需求的探索精神与热情。作为一家电机厂商,未来我们将继续完成各种挑战,并坚信将由此带来更多的专利技术。
同时,艾斯湃纳已取得的各项专利,离不开公司内外各界人士的热忱与合作精神。在此期间,艾斯湃纳开发团队进行了不计其数的验证和分析,并以开放式创新(Open innovation)的方式,与合作方企业、大学研究机构等开展了合作。
今后我们将继续与您携手并肩,为解决顾客面临的实际问题,提供全新的创意方案和高水平的技术力。通过专利技术,开创未来的产品形态。